- bet356体育在线(亚洲版)官方网站墨西哥对华塑料喷雾器启动反倾销日落复审调查
- bet356体育在线(亚洲版)官方网站双轴四通道伺服控制系统的基本原理
- 亚洲bet356体育在线官网新型“肌肉”驱动机器腿能走会跳
- bet356体育在线(亚洲版)官方网站川崎BA006NPM400F浇铸机器人防护
联系人: 张生
手机: 13800000000
电话: 400-123-4567
邮箱: admin@bet356体育在线(亚洲版)官方网站-欢迎莅临Welcome
地址: 广东省广州市bet356体育在线(亚洲版)官方网站
bet356体育在线(亚洲版)官方网站双轴四通道伺服控制系统的基本原理
bet356体育在线(亚洲版)官方网站双轴四通道伺服控制系统的基本原理本文介绍了双轴四通道伺服控制系统的基本原理,给出了系统的难点、硬件架构、控制原理,并详细阐述了单通道独立控制及多通道原位控制方式。
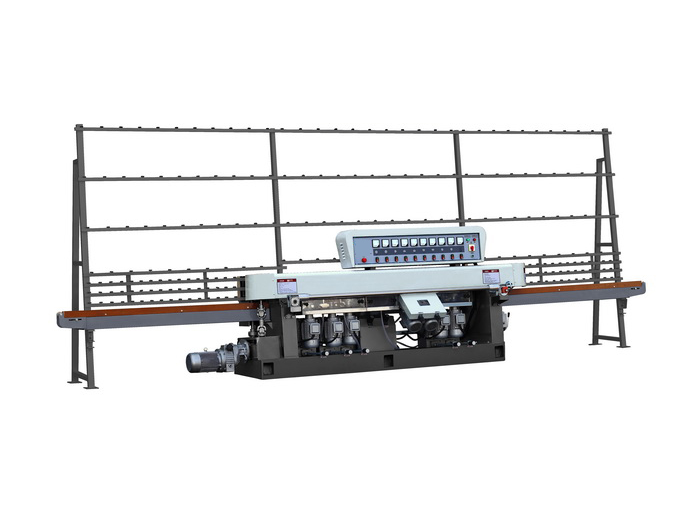
双轴四通道试验系统(如图 1 所示)既可实现多轴同步加载,又可进行单轴独立加载,广泛应用于力学性能测试、工程材料性能测试、构件形变分析等领域bet356体育在线(亚洲版)官方网站。目前,该系统结构主要有伺服电机和液压作动器两种驱动方式。伺服电机控制精度高.适合于小载荷、低频响试验;液压作动器虽然控制精度低于伺服电机.但载荷大,频响高。如果采用静压作动器.4 个通道均可满足 100Hz 以上的试验需求。
双轴四通道伺服控制系统的主要技术难点在于原位控制技术.在多轴同步运行时,确保试样中心点不变,保证X轴及Y轴方向上 4 个驱动器中心定位精度。本文通过对控制系统进行研究.结合上位机和下位机技术特点,对硬件及软件均采用模块化设计.既可实现对伺服电机控制,也可实现对液压作动器的控制。 中机试验02下位机控制系统 Lower computer control system
国内双轴四通道试验设备的控制系统,早期以模拟电路为主,配合单片机数字采集部分,形成一套完整的控制体系包括放大器、单片机智能采集及函数发生等部分。上位机采用 VB4 平台,通过RS232接口向下位机传送命令参数。后期升级为数字控制系统.采用两台计算机,其中一台计算机运行上位机软件,与第一代伺服系统类似:另一台计算机运行 DOS 系统,负责上下位机的接口及多通道任务管理。 伺服控制系统由基于两套 PCI 接口的数字组成,每套自带两路伺服控制。两路伺服系统通过 DOS 进行统一管理.进而组成一套完整的双轴四通道伺服控制系统。
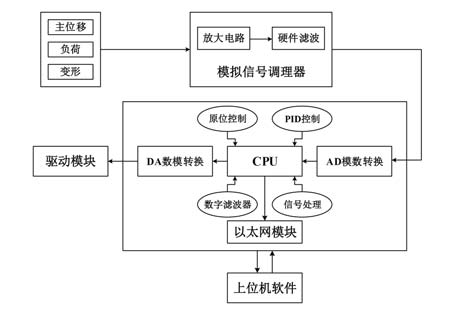
本文研究的控制系统在设计上采用国际流行的分布式系统结构,采用FPCA作为中枢接口,结合 TMS320F28335处理器.共同作为硬件主控模块。驱动部分同样采用模块化设计方式,在不提高成本的基础上,可以兼容伺服电机及液压作动器两种驱动方式。硬件系统主要包括传感器采集、放人部分AD模数转换部分,主控CPU及DA数模转换等(如图2 所示)。采用百兆以太网接口方式与上位机进行通信,增强了数据传输的稳定性,也提高了数据传输速度。
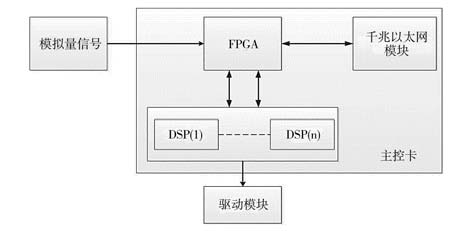
测量部分主要包括 4 个负荷传感器4 个主位移传感器及 4个小量程位移传感器。其中,负荷传感器与主位移传感器为两个控制通道,小量程位移传感器的信号主要用于原位控制算法。在试验过程中,为确保足够高的采样频率及控制频率,采用FPGA作为核心元器件进行高速采集.并将位移负荷及小位移等传感器数据同步传输到DSP中进行计算、处理.最终确保试样中心点的定心精度(如图 3 所示)。
将FPGA作为系统数据缓存、通信与控制中枢,通过EMIF 并行总线连接端口分别控制多个DSP芯片。FPCA实时并行计算实现标准数字信号处理算法的能力远强于DSP。因此,该伺服中,标准数字滤波、数据转换/读取、设备信号保护等功能均在 FPCA 中实现。DSP 用来进行其他复杂信号处理.比如PIDF 控制算法等。
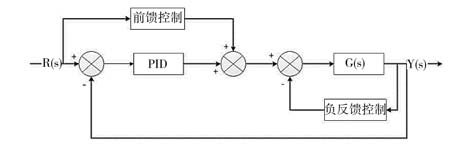
双轴四通道伺服控制系统既可以实现每个通道独立运行,又可以实现 4 个通道协调加载以进行原位控制。在这两种不同的试验方式中,采用的控制策略也不相同。传统的PID 控制方法因具有简单、可靠,不需要对象的精确数学模型等优点.在工业控制中得到非常广泛的应用。传统 PIDD 控制原理如图 4 所示。 01

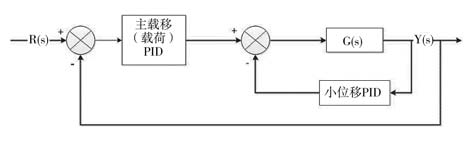
在双轴四通道伺服控制系统中,传统的 PID 控制算法主要用于每个通道独立运行的过程,如试验前试样安装调整以及需要单轴测试的试验等。 当系统采用伺服电机时,由于伺服电机驱动器自带内闭环,因此应用经典 PID 控制方式便可以达到较好的控制效果。当系统采用液压作动器时,由于液压系统的非线性,仅使用传统 PID 控制方式很难达到预期的控制效果。本文采用增加微分负反馈及前馈方式,可以有效增加系统阻尼,减小超调量,同时因为采用前馈补偿.提高了系统的跟踪性能。系统控制原理如图 5 所示,上位机软件也相应地增加了前馈及负反馈参数变量。
2. 4 原位控制 原位控制也可称为定心控制,分为静态与动态两种控制方式。静态方式控制相对简单,对于精度要求不是特别高的情况,通过传统 PID 控制或者上位机软件进行相位补偿就可以达到试验需求。但动态控制过程中,由于频响较高,导致控制精度下降,所以必须在下位机系统中进行实时计算。本文采用增加 4 个小量程、高精度位移传感器测量试验过程中的变形,因此整个系统需要两套闭环控制算法,也就是 X轴和Y轴方向的两套中心点偏差自身形成闭环控制,最终每个通道的被控对象收到的命令就是标准 PID 输出与中心点偏差 PID 输出,原位控制原理如图 6 所示。
试验中若要保持试样中心点不变,首先要测量中心点的位置。判断中心点位置有两种方式:一是通过主位移传感器,二是每个作动器都配置一个小量程、高精度位移传感器.因为主位移传感器量程大,在变形较小的试验中无法满足测量精度的要求,所以在双轴四通道试验系统的设计中采用第二种方案。双轴四通道试验系统具有 4 个服控制通道.4个通道可分为X轴和Y轴两个方向,每个轴有对称的两个通道。试验过程中.在调节中心点时,要分别确保每个轴的中点不变。 中机试验
结束语本文针对双轴四通道伺服控制系统进行了研究,全面分析了控制系统的硬件架构及控制原理通过兼容性模块设计方式,可适用于伺服电机驱动及液压作动器驱动。目前.该系统仍存在一定缺陷,如控制参数较多.对于非专业人员来说调试难度较大。 多通道试验系统未来的发展,势必会将自适应控制算法融人到控制系统中,以此来减少调试人员的工作难度。此外.增强系统带宽,可以适应更多的试验需求。
在汽车制造过程中,大量应用电液位置伺服式机械手(焊装、喷漆)、机床(冲、压)以及其他加工装置。电液位置伺服系统具有功率大、响应快bet356体育在线(亚洲版)官方网站、精度高的特点,这就要求控制系统不仅有良好的定位精度,而且要有好的伺服跟踪性能,因此是控制领域中的一个重要组成部分。电液位置伺服控制系统的典型特征是非线性、不确定性、时变性、外界干扰和交叉耦合干扰等,系统精确的数学模型不易建立。因此,对电液系统的控制一直是一个复杂控制系统问题。 常规PID具有结构简单、参数意义明确、控制的动态和静态特性优良等特点。人工神经网络(NNC)具有信息综合bet356体育在线(亚洲版)官方网站、学习记忆和自适应能力、逼近任意非线性函数的能力,可以处理那些难以用模型和规则描述的过程,但也存在局部最小点
优化设计 target=_blank
嵌入式LINUX基础教程 第2版 ((美)克里斯托弗·哈利南(Christopher Hallinan))
Follow me第二季第3期来啦!与得捷一起解锁高性能开发板【EK-RA6M5】超能力!
随着辅助驾驶和自动驾驶越来越受到主机厂的重视,转向系统测试和验证的要求也越来越高。无论是传统转向系统还是线控转向系统,转向手感都至 ...
充电桩国内外发展现状全球新能源汽车市场快速发展,充电桩需求也大幅提升,全球市场各国纷纷出台相关政策,国际能源机构(IEA)的新报告显 ...
本文系统介绍高级驾驶辅助系统(ADAS)和自动驾驶所需的激光雷达、毫米波雷达、传感器和摄像头传感器的原理、功能及区别。1 传感器的 ...
可控硅调速直流电机调试通常以输出电流、电压、转速为准。即:(1)电流大小取决于拖动负载的大小,不论负载如何变化,输出电压转速平稳即 ...
有广大客户在挑选电机调速器的时候通常以价格为衡量调速器的优良,当然有一定的可参考性。今天我们就来说说从其他略显专业的角度如何能更好 ...

站点相关:嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科